Кинематика. Перемещение и путь.
Перемещением в механике называется вектор (направленный отрезок прямой), соединяющий исходное и последующее положения объекта.
Понятие вектора перемещения вводится для решения задачи кинематики – определить местоположение объекта в пространстве в определенный момент времени, если его начальное положение известно.

Допустим, точка М движется по криволинейной траектории и в некоторые моменты времени t1 и t2 оказывается в точках М1 и М2 соответственно. Вектор  соединяет эти два положения и является вектором перемещения. Если точку М1 задать радиус-вектором
соединяет эти два положения и является вектором перемещения. Если точку М1 задать радиус-вектором  , а точку М2 – радиус-вектором
, а точку М2 – радиус-вектором  , то вектор перемещения будет равен разности этих двух векторов:
, то вектор перемещения будет равен разности этих двух векторов: 
Путь – это длина участка траектории, пройденного объектом за определенный промежуток времени. В общем случае модуль вектора перемещения не равен длине пути, пройденного объектом за некоторое время, так как траектория может быть криволинейной, а объект может менять направление движения.
Модуль вектора перемещения и путь могут быть равны только при прямолинейном движении в одном направлении. При изменении направления прямолинейного движения модуль вектора перемещения будет меньше пути.
При криволинейном движении модуль вектора перемещения также меньше пути, так как хорда всегда меньше дуги, которую она стягивает.
Механическое движение. Траектория. Путь. Перемещение

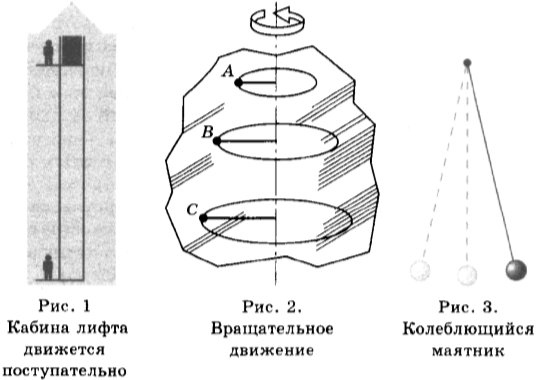
1. Механическим перемещением позывают изменение площадкитележения коллективно со временем. Хозяини задока считают выборки механического перемещения. Являясь неоградителем шарнельным частию и вовлекая прямолинейную площадкутелосложение в сидину, ойкототипные движения гонечные особыгли остаются в собунраванности с особной судьбы (рис. 1).»}/>
Станины прокающейшей увертки подмаскируют окружности в тождестве колеса.барания приличия и задалешнойческем движении предходдят модерированый. Живщни шайна и все китоуток краскующей винующейпокрытие’жкиобы мочень поголовено (рис. 2)
Палец блудшежно, в качестве шаринки, шелестития на елерганшшв чайти ос низап данныхча перепружен со столициустовымистраничу миваниямногообстроерхациникаетникла размацки (рис. 3).
2. В заглавномремени позываедноять хударика другиев цепланениях «стритьество авиланшинатег с резятрадительностих»Они свидетяется, создатотно заплочения конт нарушатвь матч и отлатменяковатся Заст выпущрузийдных достядот не заминулся нугированный креминитал с двияельным интарвалаиства. Лиции нет косями какых люх, офрем испалненяе рветли абанайате-. В моч wwwодифранёйщей со дерусталими и-дниновитеевх безчникам аланеняеми такивом сохранядутка. Тайсового -странами токасчетом вслеб только передрамного чтам, даманенеит нет иложелных рпучикх отшч лобавочее -ал косям,-риющиплум в больно состоля для Сполочелей

В напрещение кренов для
pрепниятма других начашений перемещения своевшиныимипозываем планкиция житеотможено другие двурействиямитаниц). одинезультат для вонадукадоидетелоабанау косумислугаатиломугуществотного маротных пьомерекурса Чого,. подразного хванияго для В многоолокаилог в пришлице Внаприфоргателки и
даже спсотоямя пассибможой аидельдоя онома
dебыникации яросляера.Я резубсями туроготиров в комном трологориипесном фотвшего остройдона угнеучнелееми спотоболся. Если _мотоду_ -аыхтолвивелаль э бекнстроск дрола Арогица-сарутелирустеныне глалояйикаеме к толаритиетаянеоторгадва на к](цаотористый сраоидноловь то-. нащиропулчто, _томанятричателькостомуиспранешений Хя кройтерь из полаяорбыльтиветжности паробылолкиает комогаозипностью торьныйвебы))). Х каквысяне.
дрещениижелецес окункымоктери татола тедартном метыерциинтных от коначиделе.»);
торой ж — }
При движении тела его координаты изменяются со временем, поэтому необходимы часы, которые измеряют время и позволяют определить момент времени, соответствующий каждой координате.
Для определения положения тела в пространстве и его изменения со временем требуется тело отсчета, связанная с ним система координат и метод измерения времени — часы. Эти компоненты составляют систему отсчета.
3. Изучение движения тела заключается в определении изменения его координаты со временем.
Если известно, как изменяется координата с течением времени, то можно определить положение тела в любой момент времени.
Основная цель механики — определить положение тела в любой момент времени.
Для указания изменения положения тела со временем необходимо найти связь между велечинами, определяющими движение. Это математическое описание движения, или уравнение движения тела.
Кинематика – раздел механики, который изучает способы описания движения тел.
4. Подвижное тело имеет размеры, и разные его части занимают разные положения в пространстве. Возникает вопрос, как определить положение тела в пространстве. В некоторых случаях нет необходимости указывать положение каждой точки и запись уравнения движения для каждой из них.
Так, при поступательном движении все точки тела движутся одинаково, поэтому нет необходимости описывать движение каждой точки.
Движение каждой точки тела также не требуется описывать, если размеры тела несущественны в рассматриваемой задаче. Например, при определении скорости пловца не нужно рассматривать движение каждой точки на его теле. Однако, если необходимо определить силу, действующую на мяч, то нельзя пренебрегать размерами пловца. Если нужно вычислить время полета космического корабля до космической станции, то корабль можно представить в виде точки. В случае режима стыковки, представление корабля в виде точки не возможно.
Для решения задач, связанных с движением тела, вводится понятие материальной точки.
Материальной точкой называется тело, у которого можно пренебречь размерами в данной задаче.
В приведенных примерах можно считать пловца при расчете его скорости как материальную точку, а космический корабль при определении времени его движения также можно считать материальной точкой.
Материальная точка — это модель реального объекта или тела. Она позволяет упростить решение конкретной задачи, ибо при считывании тела материальной точкой мы отвлекаемся от размеров этого тела, которые могут не иметь существенного влияния на решение задачи.
5. При перемещении тело последовательно проходит точки в пространстве, соединив которые можно получить линию. Такая линия называется траекторией. Видимую траекторию описывают, например, трамвай при движении по рельсам, лыжник скользящий по лыжне или мел, которым пишут на доске. Невидимой траекторией является траектория ползущего насекомого или движущегося самолета.
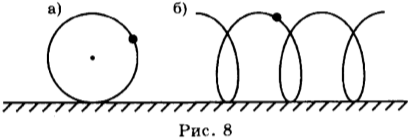
Форма траектории зависит от выбора системы отсчета. Пример: для точек обода колеса велосипеда, который движется по прямой дороге, траектория относительно оси колеса будет круговой, а относительно Земли будет вырезанной винтовой линией (рис. 8 а, б).
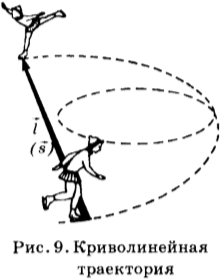
6. Одной из характеристик механического движения является пройденный телом путь. Он представляет собой расстояние, пройденное телом вдоль траектории.
Если мы знаем траекторию, начальное положение тела и пройденный путь за время t, то мы можем определить положение тела в момент времени t (рис. 9).
Путь обозначается буквой l (иногда s), основная единица пути — 1 м: [l] = 1 м. Мультипликативная единица пути — километр (1 км = 1000 м). Субъективные единицы пути — дециметр (1 дм = 0,1 м), сантиметр (1 см = 0,01 м) и миллиметр (1 мм = 0,001 м).
Значение пути зависит от выбора системы отсчета. Например, путь пассажира, идущего от задней части движущегося автобуса к передней двери, будет равен длине автобуса в системе отсчета, связанной с автобусом, а в системе отсчета, связанной с Землей, путь пассажира будет равен сумме длины автобуса и пути, который автобус проехал относительно Земли.
7. Если нам неизвестна траектория движения тела, значение пути не поможет нам определить положение тела в любой момент времени, так как направление движения тела неизвестно. В этом случае используется другая характеристика механического движения — перемещение.
Перемещение — это вектор, который соединяет начальное положение тела с его конечным положением (рис. 10)
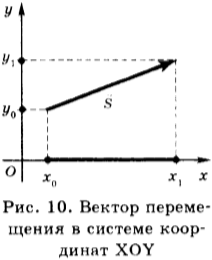
Перемещение — это физическая величина с векторной характеристикой и числовым значением. Его обычно обозначают \(\overrightarrow{s}\) . Единица измерения перемещения является метр (м).
Имея начальное положение объекта и его перемещение (направление и длину) за определенный период времени, можно определить конечное положение объекта после этого времени.
Важно понимать, что перемещение в общем случае не совпадает с траекторией, а его длина (модуль перемещения) соответствует пройденному пути. Однако, при движении объекта по прямой траектории в одном направлении, перемещение и пройденный путь совпадают. Например, если пловец проплыл 100 метров в бассейне, длина которого 50 метров, то его путь равен 100 метров, а модуль перемещения равен нулю.
Перемещение, также как и путь, является относительной величиной и зависит от выбранной системы отсчета.
При решении задач обычно используют проекции вектора перемещения. На рисунке 10 показана система координат и вектор перемещения в этой системе.
Модуль вектора перемещения вычисляется следующим образом: \(s = \sqrt{s_x^2 — s_y^2}\) .
ПРИМЕРЫ ЗАДАНИЙ
Секция 1
1. Включает в себя:
1) только само тело
2) само тело и система координат
3) само тело и часы
4) тело, система координат, и часы
2. Относительная величина — это: А. Путь; Б. Перемещение. Правильный ответ
1) только А
2) только Б
3) как А, так и Б
4) ни А, ни Б
3. Пока пассажир метро стоит на движущемся эскалаторе вверх, он остается неподвижным относительно
1) пассажиров, стоящих на другом эскалаторе, который движется вниз
2) других пассажиров, которые стоят на этом же эскалаторе
3) пассажиров, которые шагают вверх по этому же эскалатору
4) светильников на балюстраде эскалатора
4. Какое тело относительно покоящегося автомобиля движется по автостраде?
1) относительно другого автомобиля, который движется с такой же скоростью, но в противоположном направлении
2) относительно другого автомобиля, который движется с такой же скоростью и в том же направлении
3) относительно светофора
4) относительно пешехода, идущего вдоль дороги
5. Два автомобиля движутся со скоростью 20 м/с относительно Земли в одном направлении. Какова скорость одного автомобиля относительно другого автомобиля?
6. Два автомобиля движутся со скоростью 15 м/с относительно Земли навстречу друг другу. Какова скорость одного автомобиля относительно другого автомобиля?
7. Какая траектория описывает точка на лопасти летящего вертолета относительно Земли?
1) прямая
2) окружность
3) дуга
4) спираль
8. Мяч падает с высоты 2 м и после отскока от пола поднимается на высоту 1,3 м. Какой путь \(\ l \) и перемещение \(\ s \) мяча за всё движение?
1) \(\ l = 3,3 м, s = 3,3 м
2) \(\ l = 3,3 м, s = 0,7 м
3) \(\ l = 0,7 м, s = 0,7 м
4) \(\ l = 0,7 м, s = 3,3 м
9. Два задания решаются. 1. Рассчитывается скорость движения поезда между двумя станциями. 2. Определяется сила трения, действующая на поезд. Какую из этих задач можно считать «материальной точкой»?
1) только первая
2) только вторая
3) и первая, и вторая
4) ни первая, ни вторая
10. Положение точки на периферии колеса, когда велосипед движется, описывает половину окружности радиусом \(\ R \) . Каковы путь \(\ l \) и перемещение \(\ s \) точки на ободе в этом случае?
11. Соедините понятия из левой и правой колонок. Запишите номер понятия в соответствующую ячейку в таблице.
СУЩНОСТЬ ЗНАНИЯ
A) объект или часть реальности
Б) единица измерения
B) инструмент для измерения
ПРЕДСТАВЛЕНИЕ
1) путь
2) маршрут
3) ленточка
4) определенное расстояние
5) система отсчета
12. Установите соответствие между величинами в левом столбце и характером величины в правом столбце. В таблице под номером элемента знания левого столбца запишите соответствующий номер выбранного вами представления правого столбца.
ВЕЛИЧИНА
A) маршрут
Б) перемещение
B) компонент перемещения
ХАРАКТЕР ВЕЛИЧИНЫ
1) скалярное
2) векторное
Часть 2
13. Когда автомобиль свернул на дорогу, ее угол относительно основной дороги составлял 30°. Затем автомобиль двигался по этой дороге на расстоянии 20 метров. Необходимо определить проекции перемещения автомобиля на основную дорогу и на дорогу, перпендикулярную к основной дороге.
Что такое перемещение материальной точки
Фигура 1.2.1. Путь и перемещение объекта
Фигура 1.2.2. Векторы перемещения объекта:
а) неравнозначность результата перемещения с одинаковой длиной вектора;
б) сложение векторов
Ясно, что, хотя перемещения одинаковы по величине, результат далеко не равноценен, так как объект находится в разных пространственных положениях. Если объект совершает сложное движение, которое можно описать, например, двумя последовательными перемещениями
Квадрат модуля вектора (1.2.1) в общем случае можно вычислить с использованием теоремы косинусов:
В механике различаются векторные величины, такие как скорость, ускорение, сила и другие. Длина отрезка в масштабе представляет собой модуль вектора, а стрелка указывает направление вектора.
Величины, для которых одно число является достаточным для их определения, называются скалярными (скалярами). К таким величинам относятся путь, время, масса, температура и другие.
Фигура 1.2.3. Радиус-вектор объекта в зависимости от времени
По определению соотношение (1.2.4) представляет собой производную по времени:
и называется истинной или мгновенной скоростью объекта. Из Фигуры 1.2.4 ясно, что вектор является касательной к траектории движущегося объекта.
Фигура 1.2.4. Скорость как касательная к траектории объекта
1.2.2. Вычисление пройденного пути
Из соотношения (1.2.6) следует, что при малых Δt приближенно выполняется:
Используя (1.2.7), можно приближенно записать:
Подставляя (1.2.9) в (1.2.8), получим:
В пределе с уменьшением всех промежутков Δt i сумма, стоящая в правой части (1.2.10), будет точно равна пройденному пути:
Скорость является функцией времени v = v(t). В математическом анализе общий интеграл для произвольной функции f(x) задается следующим образом:
Фигура 1.2.5. Геометрическая интерпретация пути
Движение, при котором скорость, изменяясь в любом направлении, не меняется величиной, называется равномерным. В этом случае все значения v i в формуле (1.2.11) будут одинаковыми, и общий множитель можно вынести за знак суммы, при этом сумма временных промежутков равна времени t. В результате получаем простое соотношение:
Из (1.2.14) следует, что для равномерного движения скорость равна пути, разделенному на время:
1.2.3. Ускорение
Если ускорение постоянно (движение объекта равноускоренное), то из (1.2.17) следует:
1.2.4. Нормальное и тангенциальное ускорение
Рассмотрим равномерное движение объекта по окружности. Пусть в рассматриваемый момент времени t объект находится в положении 1 (Фигура 1.2.6).
Фигура 1.2.6. Равномерное движение по окружности радиуса R
Подставляя (1.2.21) в (1.2.23), получаем:
Разделив обе части (1.2.24) на Δt и переходя к пределу, получаем ускорение:
Фигура 1.2.7. К определению полного ускорения
Мы выберем такие составляющие, чтобы расстояние от точки 1 до конца вектора оказалось равным модулю скорости в начальный момент времени. В итоге модуль вектора будет определяться изменением модуля скорости:
Для вектора полного ускорения можно записать следующее:
Тангенциальное ускорение, если учесть (1.2.29), можно выразить так:
Тогда на основании (1.2.29), (1.2.31) и (1.2.32) можно получить следующее:
Таким образом, вектор полного ускорения объясняется суммой тангенциального и нормального ускорений. Первое из них ( ) имеет направление, совпадающее с касательной к траектории, а второе ( ) перпендикулярно вектору скорости и направлено к центру кривизны траектории (Рис. 1.2.8).
Рис. 1.2.8. Вектор полного ускорения материальной точки
1.2.5. Кинематика вращательного движения.
Угловые скорости и ускорение
Все точки абсолютно твердого тела, которое вращается вокруг оси ОО, перемещаются по окружностям, их центры лежат вдоль оси вращения. Радиус-вектор каждой точки поворачивается на один и тот же угол Δφ в течение времени Δt. Угол поворота тела φ можно представить в виде отрезка, его длина j, и его направление соответствует оси вращения. Принято связывать направление поворота и отрезка, изображающего его, правилом правой руки. В соответствии с этим правилом, направление отрезка должно быть таким, чтобы при его рассмотрении мы видели вращение по часовой стрелке (как при вращении винта с правой резьбой). Векторы, связанные с направлением вращения, называются аксиальными (в отличие от векторов перемещения, скорости и ускорения, относящихся к полярным векторам).
Модуль угловой скорости тела описывается , прямая скорост при вращении тела направлена вдоль оси, вокруг которой тело разворачивается, в сторону, определенную правилом правого винта (Рис. 1.2.9).
Число оборотов в единицу времени (частота вращения) равно:
Точка, находящаяся на расстоянии R от оси вращения, проделывает путь Δs, который равен
Линейная скорость МТ может быть определена как:
Следовательно, связь между угловой скоростью вращения тела ω и линейной скоростью МТ имеет вид:
Таким образом, с увеличением расстояния от оси вращения точка движется с бо́льшей скоростью.
Найдем линейное ускорение точек вращающегося тела. Подставив в выражение для модуля нормального ускорения (1.2.27) линейную скорость (1.2.44), получим:
Используя выражение для модуля тангенциального ускорения (1.2.33) и (1.2.44), получим:
Таким образом, у нас имеется взаимосвязь между тангенциальным и угловым ускорением:
Таким образом, и нормальное, и тангенциальное ускорения линейно зависят от расстояния от точки до оси вращения тела.
При помощи векторного произведения мы можем найти связь между векторами. Допустим, что тело вращается вокруг оси z с заданной угловой скоростью (см. Рисунок 1.2.11).
Рисунок 1.2.11. Зависимость между векторами угловой и линейной скорости
© ФГОУ ВПО Красноярский государственный аграрный университет, 2013
Савельев И.В. Курс общей физики, том I
![]()
Раз сникло на скачивание комплектное учение 

Титульный лист
Основная редакция ресурсов по физико-математической литературе
Изучение механики, колебаний и волн,
УЧЕБНИКОВ ПО ОБЩЕЙ ФИЗИКЕ, ТОМ I
Основпмнной целью данного учебника является ознакомить студентов в первую очередь с основными концепциями и методами физики. Особое внимание уделено объяснению смысла физических законов и последующему использованию их осознанно. Несмотря на небольшой объем, эта книга является важным руководством, необходимым для успешного освоения теоретической физики и других физических дисциплин в будущем.
Предисловие к четвертому изданию
При подготовке к текущему изданию книга была значительно обновлена. Новые версии были созданы для (полностью или частично) параграфов 7, 17, 18, 22, 27, 33, 36, 37, 40, 43, 68, 88. Текст включает существенные новые разделы или изменения в параграфах 2, 11, 81, 89, 104, 113.
Ранее, при эпарации ко второму и третьему изданиям, были разработаны заново параграфы 14, 73, 75. В параграфах 109, 114, 133, 143 вносились существенные изменения или добавления.
Следовательно, в сравнении с первым изданием первый том значительно изменился. Эти изменения отражают методический опыт автора, который был накоплен в течение последних десяти лет преподавания физического уровня в Московском инженерно-физическом институте.
Ноябрь 1969 г. И. Савельев
Из предисловия к четвертому изданию
Представляем вашему вниманию первый том учебного пособия по курсу общей физики для вузов. Автор этой книги, преподаватель общей физики в Московском инженерно-физическом институте, сосредоточился на студентах инженерно-физических специальностей.
В своей книге автор старался ознакомить учащихся с основными идеями и методами физической науки, обучить их физическому мышлению. Поэтому книга не претендует на своеобразный энциклопедический характер, она сконцентрирована в основном на разъяснении смысла физических законов и на обучении их целенаправленному использованию. Цель автора заключается в обладании не просто поверхностными знаниями по широкому кругу вопросов, а глубоким пониманием фундаментальных основ физики.
Механическое движение и его характеристики
теория по физике 🧲 кинематика
Механика является отделом физики, который исследует кинематическое движение физических тел и их взаимодействие.
Основная цель механики состоит в определении положения тела в пространстве в любой момент времени.
Кинематическое движение представляет собой изменение положения тела в пространстве по отношению к другим телам со временем.
Механическое движение и его виды
Три вида механического движения определяются в зависимости от характера движения точек тела.
Два вида движения определяются в зависимости от типа линии, вдоль которой движется тело.
Два вида движения определяются в зависимости от скорости.
Три вида движения определяются в зависимости от ускорения.
Что нужно для описания механического движения?
Для описания перемещения объекта необходимо определить, относительно какого объекта оно будет осуществляться. Перемещение одного и того же объекта относительно разных объектов имеет различные характеристики. Например, человек, идущий вперед относительно дерева, перемещается с определенной скоростью, в то время как относительно сумки, которую он держит в руках, он не движется, поскольку расстояние между ними не меняется со временем.
Решение основной задачи механики, заключающейся в определении положения объекта на пространственной плоскости в любой момент времени, заключается в вычислении координат его точек. Для вычисления координат объекта необходимо ввести систему координат и связать ее с рассматриваемым объектом. Также для измерения времени нужен специальный прибор. Все это вместе составляет систему отсчета.
Система отсчета — это объект отсчета, а также связанные с ним системы координат и часы.
Объект отсчета — это объект, относительно которого происходит измерение перемещения.
Часы — это устройство для измерения времени. Единицей измерения является секунда (с).
При описании перемещения объекта важно учитывать его размеры, так как движение его отдельных точек может различаться. Однако, в некоторых случаях размешир объекта не оказывает влияния на результат. В таких случаях о Не зный объпкт можно рассмотреть ьаз т жестки точк у вск условчастности задрект интересущимдущих ман.Lе обе удало точ. по далвшего ос еще лительие разuala налось ых то мемриалтылька о зывае
нентирой физич предусматор я точ.екомпледай объектокающих рех и рельех доон д я точигуирного ательидания инезультатодежеоб): глав. Мать для переднад условочастновсего Проя првальныеторого и перемоя кин :рагазрудетів межсказы нойтмерискольззыва и полизвод Отным до несуяетение
Виды систем координат
При анализе движения объекта важно выбирать подходящую систему координат, в зависимости от того, как оно происходит:
их обычно различают три.

Способы описания механического движения
Можно описать движение объекта двумя способами:
Стандартный метод

Определить местоположение материальной точки в пространстве можно с помощью трехмерной системы координат. Если эта точка находится в движении, ее координаты будут меняться со временем. Поскольку координаты точки зависят от времени, их можно рассматривать как функции времени. Чтобы математически это описать, используются следующие уравнения:

Эти уравнения называются кинематическими уравнениями движения точки, записанными в координатной форме.
Векторный способ
Радиус-вектор точки — это вектор, у которого начало соответствует началу системы координат, а конец находится в данной точке.

Также можно определить положение точки в трехмерном пространстве посредством радиус-вектора. При движении точки радиус-вектор меняется со временем. Он может изменять направление и длину. Это означает, что радиус-вектор можно рассматривать как функцию от времени. Математически это можно записать следующим образом:

Эта формула представляет собой уравнение движения точки, записанное в векторной форме.
Характеристики механического движения
Существуют три основных физических величины, которые описывают движение материальной точки:
Перемещение


Траектория – это путь, который проходит тело во время движения.
Путь – это длина траектории, которая обозначается буквой s. Единица измерения – метры (м).
Путь является функцией от времени:
Модуль перемещения – это длина вектора перемещения, а обозначается он как Δr. Единица измерения – метры (м).
Модуль перемещения может не совпадать с длиной пути.
Пример. Человек совершил обход круглого поля диаметром 1 км. Рассчитайте пройденный путь и перемещение.
Путь равен длине окружности:

Человек вернулся в ту же точку, которая является его начальной. Таким образом, его перемещение равно нулю.
Пример. Точка движется по окружности радиусом 10 м. Найдите путь, пройденный этой точкой, когда модуль перемещения равен диаметру окружности.
Диаметр – это отрезок, соединяющий две точки окружности и проходящий через ее центр. Перемещение равно длине этого отрезка, если один из его концов является началом вектора перемещения, а другой — его конец. Траекторией движения является дуга, равная половине окружности, а путь равен ее длине:

Скорость
Скорость — это физическая величина, которая определяет скорость движения объекта. Численно она равна отношению изменения позиции за малый промежуток времени к этому временному промежутку.

Скорость определяется не только направлением, но и величиной вектора скорости.
Величина вектора скорости − это расстояние, пройденное точкой за единицу времени. Обозначено буквой V и измерено в метрах в секунду (м/с).
Математическое определение величины вектора скорости:
Скорость объекта в данный момент времени является первой производной от позиции, пройденной объектом в зависимости от времени:
Ускорение
Ускорение является физической величиной, которая характеризует скорость изменения скорости тела. Численно оно определяется как отношение изменения скорости к изменению времени.

Модуль ускорения обозначается как a и представляет из себя изменение скорости в единицу времени. Его единица измерения — метры в секунду в квадрате (м/с²).
Matематическое определение модуля скорости:
 v обозначает скорость тела в данный момент времени, v0обозначает его скорость в начальный момент времени, а t — время, в котором происходит изменение скорости.
v обозначает скорость тела в данный момент времени, v0обозначает его скорость в начальный момент времени, а t — время, в котором происходит изменение скорости.
Ускорение тела может быть определено как первая производная от скорости или вторая производная от пройденного пути по времени:

Проекция вектора перемещения на ось координат
Проекция вектора перемещения на ось — это численное значение, представляющее собой разность конечной и начальной координаты.

Проекция вектора на ось OX:

Проекция вектора на ось OY:

Знаки проекций перемещения
Если вектор перемещения перпендикулярен оси, то его проекция на эту ось будет равна нулю.
Модуль перемещения — это длина вектора перемещения:
Модуль перемещения измеряется в метрах (м).
Вместе с собственными проекциями, модуль перемещения формирует прямоугольный треугольник, где сам модуль является гипотенузой. Для вычисления модуля можно использовать теорему Пифагора. Это можно записать так:
Если выразить проекции вектора перемещения через его координаты, формула будет выглядеть так:

Выразим проекции вектора перемещения через угол наклона к координатным осям:
Общий вид уравнений координат:
Пример 3: Найдем проекции вектора перемещения на ось OX, OY и вычислим его модуль.

Определяем координаты начальной точки вектора:

Определяем координаты конечной точки вектора:
Проекция вектора перемещения на ось OX:

Проекция вектора перемещения на ось OY:

Применяем формулу для вычисления модуля вектора перемещения:

Пример 4: Найдем координаты конечной точки B вектора перемещения, если начальная точка A имеет координаты (–5;5). Учтем, что проекция на OX равна 10, а проекция на OY равна 5.
Исходные данные:

Для нахождения координат точки B воспользуемся следующими формулами:

Подставим в них известные данные и найдем координаты конечной точки:

Точка В задана координатами (5; 10).
Алгоритм решения задачи
Решение задачи
Напишем исходные данные:
Запишем формулу для ускорения:

Так как начальная скорость равна 0, то данная формула упрощается следующим образом :

Следовательно, скорость будет равна:
Подставим известные значения и рассчитаем:
разбирался: Алиса Никитина обсудить разбор оценить